


Density-Based Spatial Clustering of Applications with Noise
밀도 기반 클러스터링
정보통신학과 / 박사과정 4학기 / 오지연
1. 이론적 배경
1.1 정의
 DBSCAN(Density-Based Spatial Clustering of Applications with Noise)
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)•
1996년에 Martin Ester와 그의 동료들에 의해 제안된 밀도 기반 군집화 알고리즘으로,
밀집된 데이터 포인트를 클러스터로 식별하고 밀도가 낮은 포인트는 노이즈로 간주함
특히 DBSCAN은 불규칙한 형태의 데이터 클러스터를 탐색하는 데 유용하며, 클러스터의 수를 미리 지정할 필요가 없다는 장점이 있음
•
머신 러닝에 주로 사용되는 클러스터링 알고리즘으로 Multi Dimension의 데이터를 밀도 기반으로 서로 가까운 데이터 포인트를 함께 그룹화하는 알고리즘
•
밀도가 다양하거나 모양이 불규칙한 클러스터가 있는 데이터와 같이 모양이 잘 정의되지 않은 데이터를 처리할 때 유용하게 사용 가능
1.2 주요 개념
밀도 기반 클러스터링•
DBSCAN은 밀도가 높은 영역을 기반으로 군집을 형성, 데이터 분포의 밀도를 분석하여 포인트들이 얼마나 서로 가깝게 모여 있는지를 측정하고, 밀집된 영역을 클러스터로 정의
•
밀집 지역: eps(반경) 내에 일정한 수 이상의 포인트(min_samples, minPts)가 존재하는 지역을 의미
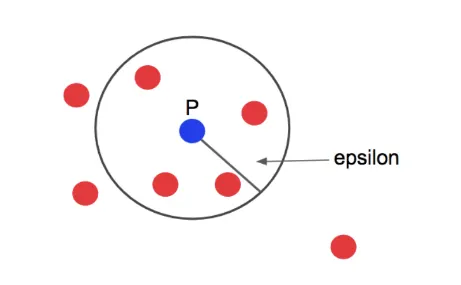
그림 출처 : https://bcho.tistory.com/1205
minPts = 4 라고 하면, 파란점 P를 중심으로 반경 epsilon 내에 점이 4개 이상 있으면 하나의 군집으로 판단할 수 있는데, 아래 그림은 점이 5개가 있기 때문에 하나의 군집으로 판단이 되고, P는 core point
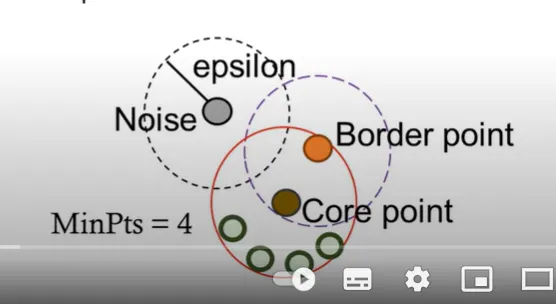
핵심 포인트(Core Point), 경계 포인트(Border Point), 노이즈 포인트(Noise Point)•
핵심 포인트: 지정된 반경(eps) 내에 최소한의 포인트 수(min_samples)를 가진 포인트로, 클러스터 형성의 중심 역할을 함
•
경계 포인트: 반경 내에 min_samples에는 미치지 않지만, 핵심 포인트와 인접해 있어 클러스터에 포함되는 포인트
•
노이즈 포인트: 어느 클러스터에도 포함되지 않는 포인트로, 밀집되지 않은 외곽 영역의 포인트
 밀도 연결 및 밀도 도달성
밀도 연결 및 밀도 도달성•
밀도 연결(density-connected): 두 포인트가 서로 핵심 포인트를 통해 연결되어 클러스터를 형성할 수 있는 관계를 의미
•
밀도 도달성(density-reachable): 핵심 포인트에서 시작해 반경 내 다른 포인트로 이동하며 클러스터 내 모든 포인트에 도달할 수 있음
•
DBSCAN은 밀도가 높은 영역을 기반으로 군집을 형성합니다. 데이터 분포의 밀도를 분석하여 포인트들이 얼마나 서로 가깝게 모여 있는지를 측정하고, 밀집된 영역을 클러스터로 정의합니다.
•
밀집 지역: eps(반경) 내에 일정한 수 이상의 포인트(min_samples)가 존재하는 지역을 의미합니다.
1.3 주요 파라미터
•
DBSCAN의 두 가지 주요 파라미터는 eps와 min_samples
•
이 두 파라미터는 클러스터의 크기와 형태를 결정하는 중요한 요소
•
예를 들어, eps가 너무 작으면 작은 군집만 형성되고, 너무 크면 군집이 병합될 수 있음
•
min_samples가 클수록 더 강력한 군집을 형성하지만 노이즈로 분류되는 포인트가 증가할 수 있음
eps(epsilon)•
포인트들이 서로 밀집되어 있다고 간주하기 위한 거리, 반경 eps 내에 특정 수 이상의 이웃이 있어야 밀집된 영역으로 간주
min_samples•
하나의 클러스터로 인정하기 위해 eps 내에 있어야 할 최소한의 이웃 포인트 수
1.3 알고리즘 흐름
DBSCAN은 밀도가 낮은 지역을 쉽게 제외하고, 밀도가 높은 지역에서만 클러스터를 형성하는 방식으로 고정된 개수가 아닌 클러스터를 탐지할 수 있음
1.
데이터셋에서 임의의 포인트를 선택
2.
선택된 포인트가 핵심 포인트라면, 해당 포인트를 중심으로 반경 내에 있는 포인트들과 연결하여 클러스터를 형성
3.
반경 내에 min_samples 이하의 포인트가 있으면 해당 포인트를 노이즈로 간주
4.
연결된 모든 포인트가 클러스터로 묶일 때까지, 위 과정을 반복
1.4 장단점
DBSCAN은 고객 세분화, 이상치 탐지, 이미지 분석 등 다양한 분야에서 널리 활용
장점•
불규칙한 모양의 클러스터: DBSCAN은 클러스터가 원형이 아니더라도 밀도에 따라 복잡한 모양의 클러스터를 찾는 데 유리
•
노이즈 처리: DBSCAN은 노이즈 데이터를 효과적으로 걸러내어 클러스터 내에 이상치가 포함되지 않도록 해야함
•
사전 클러스터 수 지정 불필요: DBSCAN은 k-means처럼 클러스터 수를 미리 지정할 필요가 없음
단점•
밀도가 다양한 데이터에 약함: 밀도가 크게 차이나는 데이터에 대해선 성능이 떨어질 수 있음
•
eps와 min_samples 설정이 민감: 파라미터 설정에 따라 클러스터링 결과가 크게 달라질 수 있음
2. 동작 원리
DBSCAN의 동작 원리는 밀도 기반 접근 방식으로, 특정 지역의 밀집도를 기준으로 클러스터를 형성하는 것
2.1 기본 개념
DBSCAN은 데이터 포인트가 밀집된 영역을 클러스터로 정의하며, 이 과정에서 두 가지 주요 파라미터를 사용
eps•
두 포인트가 같은 클러스터에 속하려면 이 정도 거리 이내에 있어야 하는 임계 반경
min_samples•
한 포인트가 핵심 포인트로 간주되기 위해 eps 내에 포함되어야 할 최소 이웃 포인트 수
2.2 포인트의 유형
DBSCAN은 각 포인트를 다음 세 가지 유형으로 분류
핵심 포인트(Core Point)•
eps 내에 min_samples 이상 이웃이 있는 포인트입니다. 이 포인트는 클러스터 형성의 중심이 됨
경계 포인트(Border Point)•
eps 내에 min_samples 미만의 이웃이 있지만, 다른 핵심 포인트와 연결되어 있어 클러스터에 속할 수 있는 포인트
노이즈 포인트(Noise Point)•
어느 클러스터에도 속하지 않는 포인트입니다. 밀도가 낮은 지역에 위치한 포인트로 간주
2.3 알고리즘 단계
1.
임의 포인트 선택: 데이터셋에서 아직 방문하지 않은 임의의 포인트를 선택
2.
이웃 포인트 탐색: 선택된 포인트를 기준으로 반경 eps 내에 있는 모든 이웃 포인트를 탐색하여, 이 포인트가 핵심 포인트인지 확인
•
이웃 포인트가 min_samples 이상 있으면 해당 포인트는 핵심 포인트로 간주
•
만약 이웃 포인트가 min_samples 미만이면 노이즈로 간주할 수도 있지만, 다른 핵심 포인트와 연결되면 경계 포인트가 될 수 있음
3.
클러스터 확장: 핵심 포인트가 확인되면, 해당 포인트를 중심으로 이웃 포인트들을 클러스터에 추가. 이 과정에서 새롭게 추가된 이웃 포인트가 핵심 포인트일 경우, 이를 중심으로 추가적인 이웃 탐색을 통해 클러스터가 계속 확장됨
4.
노이즈 포인트 구분: 클러스터에 속하지 않은 포인트는 노이즈로 간주 노이즈 포인트는 클러스터에 포함되지 않지만, 후속 클러스터 확장에서 경계 포인트로 변할 가능성도 있음
5.
모든 포인트가 방문될 때까지 반복: 위 과정을 모든 포인트에 대해 반복하며, 더 이상 클러스터로 확장할 수 없는 경우 다음 클러스터 생성을 위해 새로운 미방문 포인트를 선택
2.4 DBSCAN의 강점 및 파라미터의 영향
DBSCAN은 클러스터 수를 미리 정의할 필요가 없고, 클러스터가 불규칙한 모양이어도 잘 찾아냄 하지만 eps와 min_samples 설정에 따라 결과가 크게 달라지므로 적절한 파라미터 튜닝이 필요 eps가 작으면 작은 클러스터가 여러 개 생기고, 크면 클러스터가 과도하게 확장될 수 있음 이러한 원리를 통해 DBSCAN은 고밀도 영역에서 클러스터를 형성하고, 밀도가 낮은 포인트는 노이즈로 분류하는 군집화 방법3. 코드 구현 및 데모
Python의 scikit-learn 라이브러리는 DBSCAN을 쉽게 사용할 수 있는 기능을 제공
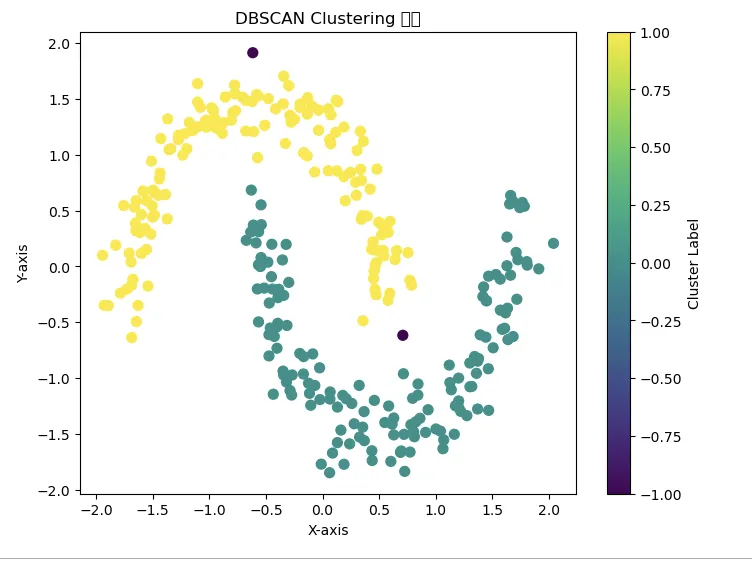
3.1 DBSCAN 알고리즘을 적용하여 클러스터링 결과를 시각화_코드 구현 예시
import numpy as np
import matplotlib.pyplot as plt
from sklearn.datasets import make_moons
from sklearn.cluster import DBSCAN
from sklearn.preprocessing import StandardScaler
# 데이터셋 생성
X, y = make_moons(n_samples=300, noise=0.1, random_state=0) # 반달 모양의 데이터셋 생성
X = StandardScaler().fit_transform(X) # 데이터 표준화
# DBSCAN 모델 설정 및 학습
dbscan = DBSCAN(eps=0.3, min_samples=5) # eps와 min_samples 설정
labels = dbscan.fit_predict(X) # 모델을 통해 각 포인트의 클러스터 할당
# 결과 시각화
plt.figure(figsize=(8, 6))
plt.scatter(X[:, 0], X[:, 1], c=labels, cmap='viridis', s=50, marker='o')
plt.xlabel("X-axis")
plt.ylabel("Y-axis")
plt.title("DBSCAN Clustering 결과")
plt.colorbar(label="Cluster Label")
plt.show()
Python
복사
3.2 코드 설명
데이터 생성•
make_moons 함수를 사용하여 반달 모양의 2D 데이터를 생성, 이 데이터는 불규칙한 형태의 클러스터로 이루어져 있어 DBSCAN을 사용하기에 적합
•
StandardScaler를 사용하여 데이터를 표준화하여 스케일 차이가 결과에 영향을 미치지 않도록 함
DBSCAN 모델 설정•
DBSCAN 객체를 생성하고, eps=0.3과 min_samples=5로 설정
•
eps: 각 포인트에서 이웃 포인트를 찾는 반경(거리)
•
min_samples: 해당 반경 내에 있어야 하는 최소 이웃 포인트 수
모델 학습 및 클러스터 할당•
fit_predict 메서드를 사용하여 DBSCAN 모델을 학습하고 각 포인트에 대해 클러스터 레이블을 할당
•
labels 변수에는 각 포인트가 속하는 클러스터 번호가 저장되며, 노이즈 포인트는 -1로 표시
결과 시각화•
matplotlib를 사용하여 각 포인트의 클러스터를 시각화
•
포인트 색상은 클러스터 레이블에 따라 결정되며, 노이즈 포인트는 다른 색상으로 표시
3.3 파라미터 변경에 따른 클러스터링 결과_코드 구현 예시
DBSCAN의 eps와 min_samples 값을 조정하면 결과가 크게 달라질 수 있음. 아래는 파라미터를 조정하며 결과를 비교할 수 있는 코드
# 파라미터 튜닝 실험 함수
def dbscan_experiment(eps_value, min_samples_value):
# DBSCAN 모델 설정
dbscan = DBSCAN(eps=eps_value, min_samples=min_samples_value)
labels = dbscan.fit_predict(X)
# 결과 시각화
plt.figure(figsize=(8, 6))
plt.scatter(X[:, 0], X[:, 1], c=labels, cmap='plasma', s=50, marker='o')
plt.xlabel("X-axis")
plt.ylabel("Y-axis")
plt.title(f"DBSCAN with eps={eps_value} and min_samples={min_samples_value}")
plt.colorbar(label="Cluster Label")
plt.show()
# 실행
dbscan_experiment(0.3, 5) # eps=0.3, min_samples=5
dbscan_experiment(0.5, 5) # eps=0.5, min_samples=5
dbscan_experiment(0.3, 10) # eps=0.3, min_samples=10
Python
복사
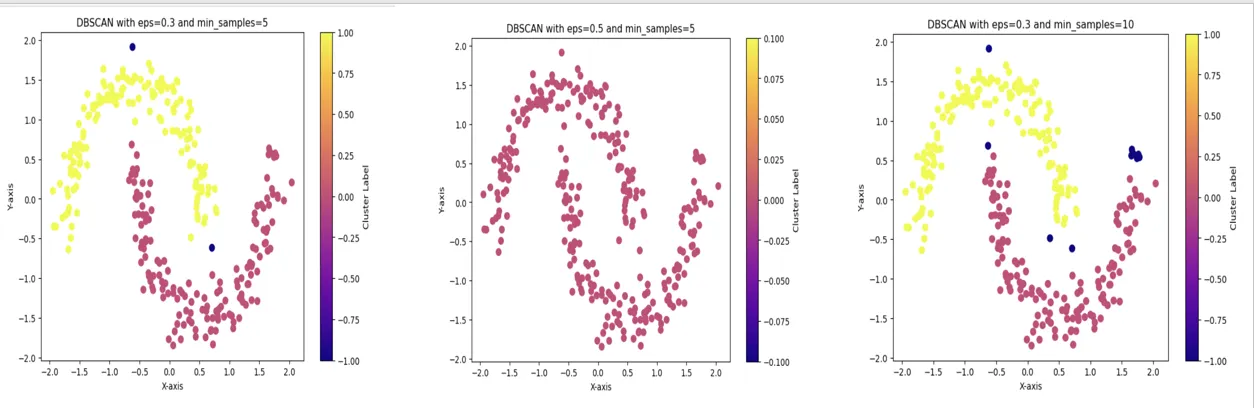
3.4 결과 분석
eps 값의 변화•
eps가 작아지면 클러스터가 세밀해지지만 작은 군집이 여러 개 형성되고 노이즈로 분류되는 포인트가 증가
•
eps가 커지면 더 큰 영역을 포괄하는 클러스터가 형성되며, 적은 클러스터 수로 나뉠 수 있음
min_samples 값의 변화•
min_samples 값이 커지면 클러스터에 포함되기 위한 최소 이웃 수가 증가하므로, 밀도가 높은 곳에서만 클러스터가 형성됨 그 결과로 노이즈가 많아질 수 있음
•
min_samples 값이 작아지면 더 많은 포인트가 클러스터로 포함되며, 노이즈가 줄어들 수 있음
이와 같이 파라미터 설정에 따라 클러스터링 결과가 달라질 수 있으므로, 실제 데이터에 맞는 적절한 파라미터 튜닝이 중요
3.5 결론
DBSCAN이 밀도가 높은 지역에서 클러스터를 형성하고 밀도가 낮은 포인트는 노이즈로 구분하는 방식으로 작동한다는 것을 확인할 수 있음4. 번외
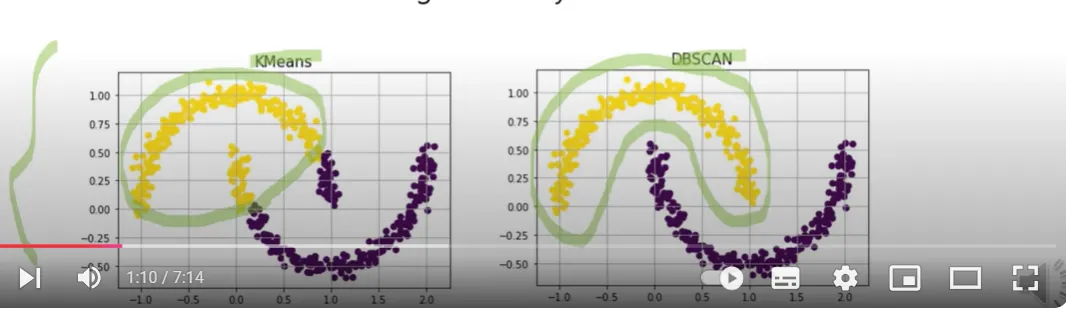
4.1 K-Means Clustering과의 차이
보통 Clustering 문제에서 K-Means Clustering을 우선 떠올리므로, K-Means Clustering과 DBSCAN의 차이 비
특징 | DBSCAN | K-means Clustering |
Cluster의 모양 | 데이터의 Cluster 모양이 arbitrary하게 묶이는 경우 잘 Clustering 됨 | 데이터의 Cluster 모양이 Spherical한 경우에 잘 Clustering 됨 |
Cluster의 개수 | 군집화 개수를 미리 정해주지 않아도 됨(밀도 기반) | 군집화 될 개수를 미리 정해줘야함 (centroid 기반) |
Outlier | Clustering에 포함되지 않는 Outlier를 특정할 수 있음 | 모든 데이터가 하나의 Cluster에 포함됨 |
Initial Setting | 초기 Cluster 상태가 존재하지 않음 | 초기 Centroid 설정에 따라 결과가 많이 달라짐 |
•
DBSCAN과 K-means Clustering 사이에 어느 것이 좋다는 다루는 데이터에 따라 많이 달라짐
•
DBSCAN은 일반적으로 K-means Clustering에 비해 <불규칙 데이터를 다룰 때, Noise와 Outlier가 많을 것으로 예상될 때, 데이터에 대한 사전 예측이 어려울 때> 활용하는 것이 좋다.
•
DBSCAN은 K-means Clustering에 비해 <Computational Cost가 많이 든다는 점, 예측과 해석이 어렵다는 점>의 단점이 있다.
참고 자료
DBSCAN의 창시 논문•
Martin Ester, Hans-Peter Kriegel, Jörg Sander, Xiaowei Xu가 발표한 "A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise" 논문리뷰를 참고하여 알고리즘의 기본 개념과 동작 원리 등을 설명
기계 학습 및 데이터 마이닝 기본서•
"Pattern Recognition and Machine Learning" (Christopher M. Bishop): 클러스터링과 밀도 기반 군집화에 대한 이론적 배경 리뷰 참고
•
"Data Mining: Concepts and Techniques" (Jiawei Han, Micheline Kamber, Jian Pei): 클러스터링 알고리즘, 특히 밀도 기반 클러스터링에 대한 자세한 개념 설명 리뷰 참고
YouTube